







Giải pháp phát hiện xe nhúng dựa trên cảm ứng điện từ
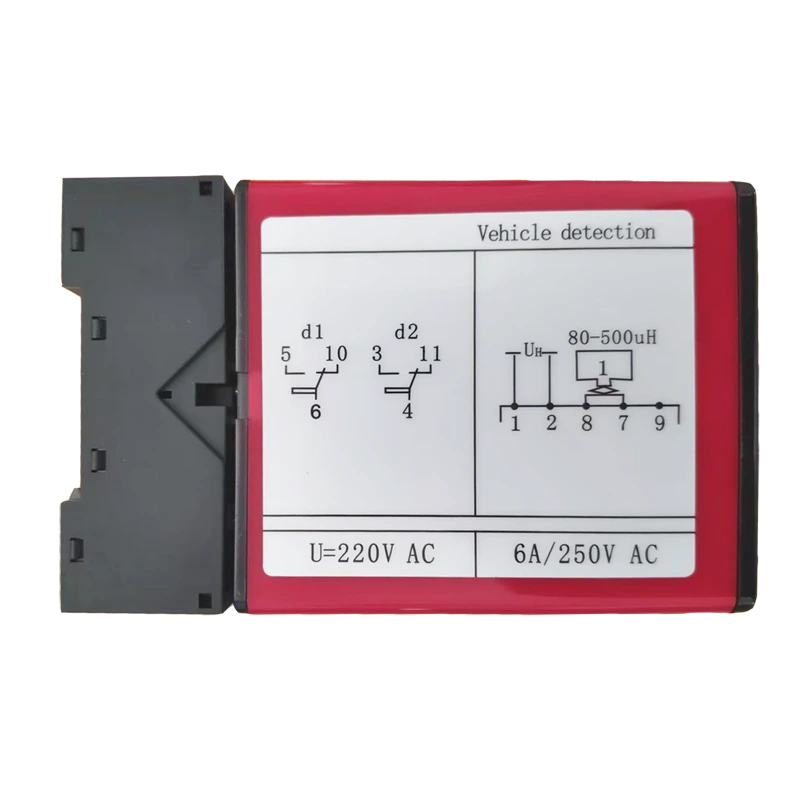
Thiết bị phát hiện xe vòng cảm ứng là thiết bị phát hiện sự hiện diện của xe thông qua các vòng cảm ứng được nhúng dưới mặt đường. Khi xe đi qua hoặc ở phía trên vòng cảm ứng, thiết bị phát hiện sẽ ghi lại những thay đổi về tính chất điện từ của thân kim loại và kích hoạt tín hiệu đầu ra.
Phương pháp phát hiện này có độ chính xác cao, độ ổn định và khả năng chống nhiễu mạnh, do đó được sử dụng rộng rãi trong các ứng dụng như kiểm soát cổng chắn, quản lý tín hiệu giao thông và đếm xe.
Nguyên lý hoạt động
● Cảm ứng điện từ: Một trường điện từ xoay chiều được tạo ra bởi một vòng lặp được nhúng dưới mặt đường.
● Phát hiện phương tiện: Khi một phương tiện bằng kim loại đi qua khu vực vòng lặp, thân kim loại sẽ gây ra sự thay đổi trong độ tự cảm của vòng lặp.
● Xử lý tín hiệu: Bộ phát hiện phân tích sự thay đổi độ tự cảm để xác định trạng thái hiện diện của xe và đưa ra tín hiệu chuyển mạch.
Chức năng cốt lõi
● Phát hiện sự hiện diện của phương tiện: Phát hiện chính xác xem phương tiện có ở phía trên vòng lặp hay không.
● Phát hiện đường đi qua: Phát hiện thời điểm và hướng xe đi qua vòng lặp.
● Chức năng đếm: Đếm số lượng xe đi qua vòng lặp.
● Ước tính tốc độ: Ước tính tốc độ xe dựa trên độ dài vòng lặp và thời gian di chuyển.
Thông số kỹ thuật
● Độ chính xác phát hiện: >99% (phù hợp với xe có thân bằng kim loại).
● Thời gian phản hồi: <10 ms (phản hồi tốc độ cao, hiệu suất thời gian thực).
● Phạm vi độ tự cảm vòng lặp: 50μH–1000μH (có thể điều chỉnh để phù hợp với các thông số kỹ thuật vòng lặp khác nhau).
● Tín hiệu đầu ra: Công tắc rơle, RS485, Ethernet, v.v.
● Nguồn điện đầu vào: 12V DC/24V AC, công suất tiêu thụ <5W.
● Nhiệt độ hoạt động: -40°C đến 85°C (thiết kế nhiệt độ rộng cấp công nghiệp).
● Xếp hạng bảo vệ: IP67 (phù hợp với môi trường ngoài trời khắc nghiệt).
Tính năng sản phẩm
● Lắp đặt máy dò: Lắp trên tường hoặc lắp trong tủ, kết nối với vòng lặp thông qua cáp.
● Gỡ lỗi và hiệu chuẩn: Điều chỉnh độ nhạy thông qua công tắc DIP hoặc phần mềm.
● Tín hiệu giao thông: Điều khiển tín hiệu cảm ứng điều chỉnh thời lượng đèn xanh dựa trên lưu lượng giao thông.
● Đường cao tốc: Phát hiện xe tại trạm thu phí, kích hoạt hệ thống ETC.
● Đếm phương tiện: Thống kê lưu lượng giao thông trên đường hoặc bãi đậu xe.
● Bảo vệ an ninh: Được sử dụng để phát hiện xâm nhập trái phép hoặc kiểm soát phương tiện trong khu vực.
● Chống nhiễu mạnh: Không bị ảnh hưởng bởi điều kiện thời tiết (mưa, tuyết, sương mù, v.v.).
● Tuổi thọ cao: Không có bộ phận cơ khí, không hao mòn các linh kiện nhúng.
● Chi phí thấp: Chi phí vòng lặp thấp, bảo trì đơn giản.
● Độ ổn định cao: Thích hợp cho hoạt động liên tục trong thời gian dài.